 |
| Vertrieb und Support:
|
Bönig
und Kallenbach oHG Am Spörkel 100 D-44227 Dortmund |
| Telefon: | Tel.: +49 / 231 /
753650 Fax.:+49 / 231 / 753659 |
| Internet: |
| Inhaltsverzeichnis : |
![]()
Die Installation
Die fischertechnik-Software besteht zum einen aus einem fertigen RealBasic-Programm, welches alle Modelle des Baukastens ganz einfach steuerbar macht. Damit läßt sich schnell überprüfen, ob man alles richtig zusammengebaut und angeschlossen hat.
Wer sich für die Programmierung im Hintergrund interessiert, der kann sich sämtliche Quelltexte in RealBasic öffnen und beliebig anpassen.
Ab sofort gibt es für alle fischertechnik-Baukästen native Treiber für MacOS X. So kann man die Classic-Umgebung getrost geschlossen lassen. Natürlich gibt es weiterhin auch alle Treiber auch für MacOS 9.
Es liegen darüber hinaus noch Treiber für die Programmierung per AppleScript bei. AppleScript-Programme lassen sich aus praktisch jeder Anwendung heraus aufrufen. Auch ein FileMaker-PlugIn liegt dem Treiberpaket bei. Damit kann man direkt aus FileMaker heraus eine Robotersteuerung aufbauen.
Der Baukasten und die Mac-Anbindung
Diesem Baukasten liegen viele Motoren und Taster bei. Diese kommen bei den Roboterkonstruktionen in Massen zum Einsatz. Auch viele mechanische Komponenten wie Getriebeteile und Wellen werden hier benötigt.
Diese werden über ein Switchboard, genannt SERVICE USB, abgefragt bzw. gesteuert.
Normalerweise wird hier nur die PC-Software mitgeliefert. Die Mac-Version gibt es separat bei obiger Adresse zu kaufen.
Neben dem Baukasten selber wird auch noch das SERVICE USB mitgeliefert. Das SWITCHBOARD wird über USB an den Mac angeschlossen. An Software liegt bereits fertige Programme passend zu den einzelnen Modelle bei.
Wer hinter die Kulissen schauen möchte, findet auch den Quell-Code für die RealBasic-Projekte. Außerdem kann man den fischertechnik-Baukasten über AppleScript ansteuern. Auch Unterstützung für Filemaker Pro, RagTime, Macromedia Director und Metrowerks CodeWarrior ist vorhanden. Die entsprechenden Programmerweiterungen sind schnell und einfach installiert.
Die Software läuft derzeit unter MacOS 9 bzw. Classic als auch nativ unter MacOS X.
Die Komponenten und die Modelle
Der fischertechnik-Baukasten "Industrie-Roboter" beinhaltet eine große Palette an interessanten Bauteilen und Komponenten. Diese werden aber erst recht in der fertigen Kombination bzw. beim Zusammenbau interessant. Dann erst erkennt man, wie die einzelnen Bauteile zu einem großen Ganzen zusammengesetzt werden.
Gegenüber dem fischertechnik-Baukasten "Computing Starter" ist dieser deutlich anspruchsvoller. Zum Zusammenbau eines Modells benötigt ein geübter Fischertechniker ca. 2 Tage. Insgesamt lassen sich 4 unterschiedliche Roboter zusammenbauen. Dabei lassen sich im Aktionsradius des Roboters alle 3 Bewegungsrichtungen anfahren.
Hier einige interessante und lehrreiche Detailaufnahmen:

Um eine Wellenbewegung um 90° zu drehen, werden an beiden Enden der Wellen 45°-Zahnkränze aufgesetzt. Wichtig für die einwandfreie Funktion ist eine gute Feinabstimmung der Zahnradposition sowie eine gute Lagerung.
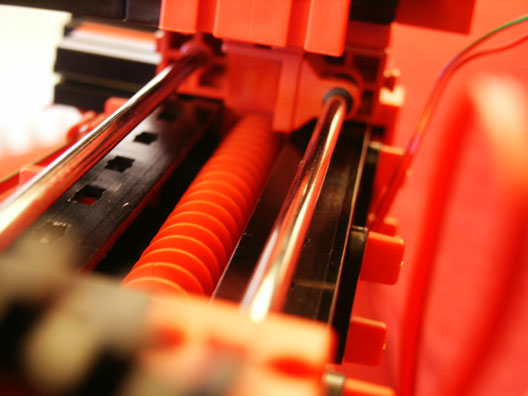
Um schwere Lasten sehr fein dosiert auf und ab zu bewegen, wird eine Welle mit Schneckengetriebe eingesetzt. Durch Drehung der Welle kann die Höhe des Schlittens verändert werden. Die Metallstangen dienen eigentlich nur zur Lagerung und zur Fixierung.
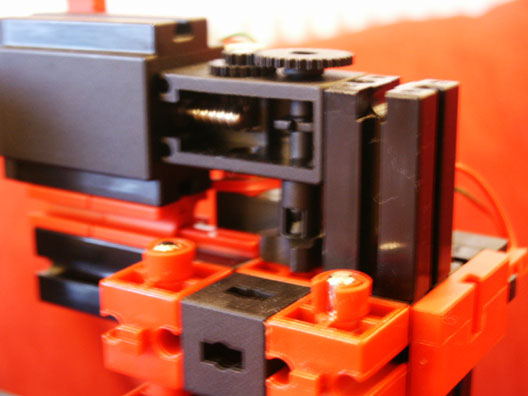
Ein Elektromotor treibt immer eine Welle an, deren Kraft hier am Ende über ein Schneckengetriebe an ein Zahnradgetriebe abgegeben wird. Die hohe Drehzahl wird durch die Übertragung von kleinem zu großem Zahnrad verringert. Die Drehzahl des Motors kann nicht beeinflußt werden, daher ist ein solches Untersetzungsgetriebe notwendig.
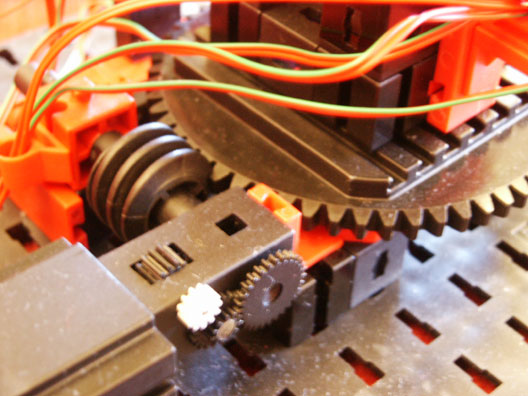
Auch hier wird die hohe Drehzahl des Motors in eine geringere umgewandelt. Diese treibt ein großes Zahnrad an, um so den kompletten Roboter-Sockel zu drehen. Durch die Umschaltung der Drehrichtung des Motors wird eine Links- bzw. Rechtsdrehung des Roboters bewirkt.
Um so sieht eines der Robotermodelle komplett aus. Er verfügt über eine Hebe-/Senk-Vorrichtung, um die Höhe des Greifers zu verstellen. Auch kann der komplette Roboterarm nach links oder rechts gedreht werden.
Die Position des Greifers hin bzw. weg vom Torso kann ebenfalls über eine Längsbewegung gesteuert werden. Zuletzt kann der Greifer geöffnet bzw. geschlossen werden.
Es kommt schnell zu einem Kabelgewirr. Wichtig ist, dass man die beiliegenden Kabel nicht allzu lang abschneidet, sonst reichen sie nicht aus, um all die Motoren und Sensoren anzuschließen.
Die Mac-Steuersoftware ist übersichtlich und speziell auf die einzelnen Robotermodelle ausgelegt. Es können Bewegungen entweder manuell über die Knöpfe ausgeführt werden, oder ganze Programme bzw. Abfolgen von Befehlen aufgezeichnet werden. Diese können dann am Stück ausgeführt werden.
Da das Service-USB-Modul auch über 2 analoge Eingänge verfügt, können nicht-digitale Eingaben gemacht werden. Es sind zwischen 0 und 255 verschiedene Zustände z.B. von einem Wärmesensor oder von einem Lichtsensor ampfangen und ausgewertet werden. Wenn man diese Eingaben über die Zeitachse aufzeichnet und darstellt, erhält man ein solches Diagramm.
Die Zielgruppe
Im Gegensatz zum Starter-Paket ist das Roboter-Paket deutlich anspruchsvoller. Der Zusammenbau eines Roboters dauert mindestens 2 Tage. Die mechanische Installation ist sehr filigran und verlangt nach einem sorgsamen Aufbau. Die Verkabelung ist recht aufwendig vorzunehmen. Wer ein Modell fertiggebaut hat, wird damit eine Menge Spaß haben und kann viel dabei über die Lehre der Mechanik bzw. über Getriebebau lernen. Jede Komponente findet man in einem Automobil oder in einer Industrieanlage.
Neben Schülern und Studenten werden auch all diejenigen angesprochen, die gerne mit Elektronik basteln und dazu noch einen Einstieg in die Programmierung suchen. Beides wird mit diesem Roboter-Bausatz optimal gefördert. Man sollte aber bereits erste Erfahrungen mit dem Starter-Paket gesammelt haben, um diesen deutlich anspruchsvolleren Baukasten in den Griff zu bekommen.
Fazit: Die Software und die Hardware sind optimal aufeinander abgestimmt und man kommt mit ein bischen Mühe zu guten Ergebnissen. Nachdem alle Komponenten jetzt auch nativ für MacOS X vorliegen, gibt es jetzt überhaupt nichts mehr auszusetzen. Wer also mit RealBasic oder FileMaker bzw. AppleScript die Roboterkonstruktionen steuern will, kann dies tun.
Prädikat: Besonders wertvoll
Bericht: Christian Abele